1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
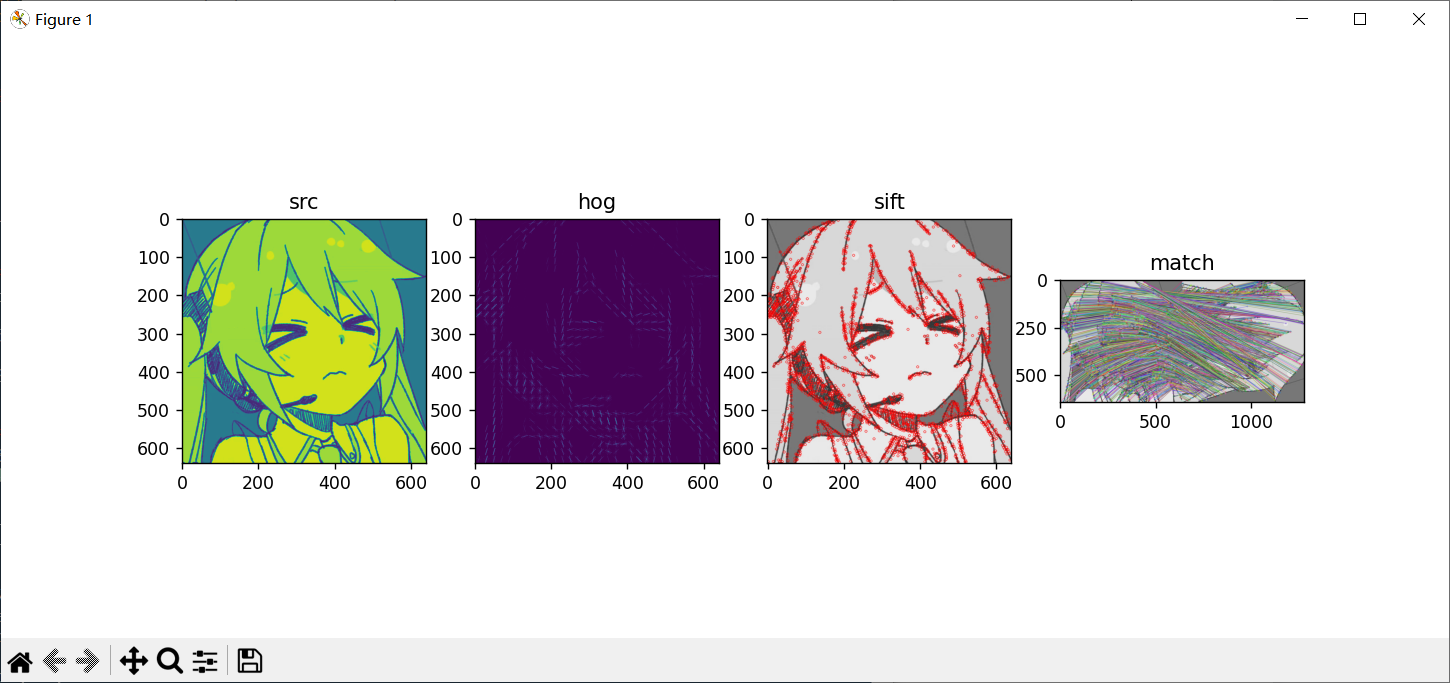
| from skimage import feature as ft
import cv2
import matplotlib.pyplot as plt
import numpy as np
img = cv2.imread(r'C:\Users\86181\Desktop\CVLab\lab4\666.jpg', 0)
hog = ft.hog(img,
orientations=6,
pixels_per_cell=[20,20],
cells_per_block=[2,2],
visualize=True)
img1 = hog[1]
sift = cv2.SIFT_create()
kp,des = sift.detectAndCompute(img,None)
img2=cv2.drawKeypoints(img,kp,img,color=(255,0,0))
img3 = cv2.imread(r'C:\Users\86181\Desktop\CVLab\lab4\666.jpg', 0)
img4 = cv2.imread(r'C:\Users\86181\Desktop\CVLab\lab4\revolve.jpg', 0)
psd_kp1, psd_des1 = sift.detectAndCompute(img3, None)
psd_kp2, psd_des2 = sift.detectAndCompute(img4, None)
FLANN_INDEX_KDTREE = 1
index_params = dict(algorithm=FLANN_INDEX_KDTREE, trees=5)
search_params = dict(checks=50)
flann = cv2.FlannBasedMatcher(index_params, search_params)
matches = flann.knnMatch(psd_des1, psd_des2, k=2)
goodMatch = []
for m, n in matches:
if m.distance < 0.50*n.distance:
goodMatch.append(m)
goodMatch = np.expand_dims(goodMatch, 1)
img5 = cv2.drawMatchesKnn(img3, psd_kp1, img4, psd_kp2, goodMatch, None, flags=2)
titles = ['src','hog', 'sift', 'match']
imgs = [img, img1, img2, img5]
for i in range(4):
plt.subplot(1,4,i+1)
plt.imshow(imgs[i].astype('uint8'))
plt.title(titles[i])
plt.show()
|